ДАТЧИКИ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ DG6
Сенсорные системы распределительного и коленчатого валов используются для определения частоты вращения коленчатого вала и положения ВМТ поршней двигателя. Каждая сенсорная система состоит из импульсного колеса (с отверстиями по кругу) и соответствующего датчика, которым определяются положения вала и угловые соотношения (так называемая «синхронизация» валов). Эти данные, в свою очередь, предоставляют информацию о положении поршня двигателя.
Положения коленчатого и распределительного валов определяется с помощью датчиков частоты вращения двигателя DG6.
Датчик частоты вращения двигателя DG6 является пассивным, индуктивным (или генераторным) датчиком.
УСТРОЙСТВО И ПРИНЦИП РАБОТЫ ДАТЧИКА ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ
Датчик монтируется напротив ферромагнитного импульсного колеса 7 (например, маховик коленчатого вала), и отделен от него воздушным зазором. Датчик содержит мягкий железный сердечник 4 (полюсный наконечник), который окружен катушкой индуктивности 5. Полюсный наконечник соединен с постоянным магнитом 1. Магнитное поле проходит через полюсный наконечник внутрь импульсного колеса. Интенсивность магнитного потока, проходящего через катушку, зависит от того, что находится напротив датчика зуб или паз (отверстие) импульсного колеса. Зуб вызывает усиление, а паз, наоборот, ослабление интенсивности магнитного потока. Эти изменения наводят (индуцируют) в катушке электродвижущую силу (ЭДС), выражаемую в синусоидальном выходном напряжении, которое пропорционально частоте вращения вала. Амплитуда переменного напряжения сильно растет с увеличением частоты вращения (от нескольких мВ до 100 В). Достаточная для регистрации датчиком амплитуда напряжения возникает, начиная с частоты вращения вала, равной 30 мин-1.
Геометрические формы паза (отверстия) и полюсного наконечника должны соответствовать друг другу. Система обработки сигналов преобразует выходное напряжение с импульсами синусоидальной формы с переменной амплитудой (аналоговый синусоидальный сигнал) в напряжение с импульсами прямоугольной формы с постоянной амплитудой (цифровой сигнал). Аналого-цифровое преобразование осуществляется в микропроцессоре блока управления.
Индуктивный датчик частоты вращения коленчатого вала (устройство).
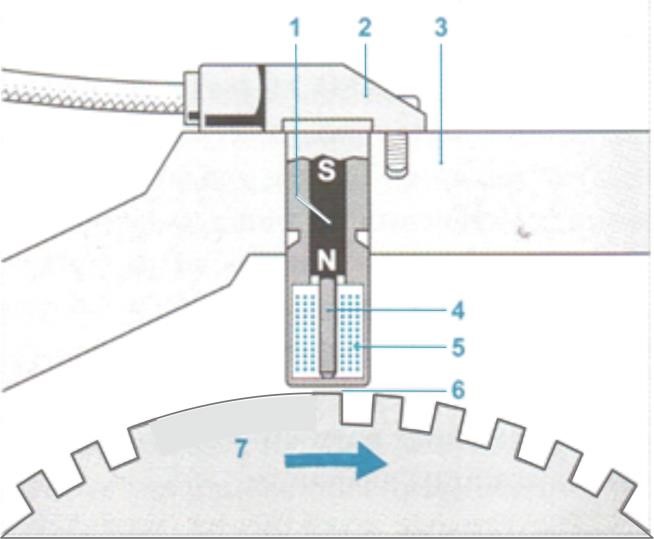
1 – постоянный магнит; 2 – корпус датчика; 3 – картер маховика; 4 – полюсный наконечник; 5 – катушка индуктивности; 6 – воздушный зазор; 7 – импульсное колесо с опорной меткой (маховик).
График сигнала индуктивного датчика частоты вращения коленчатого вала.
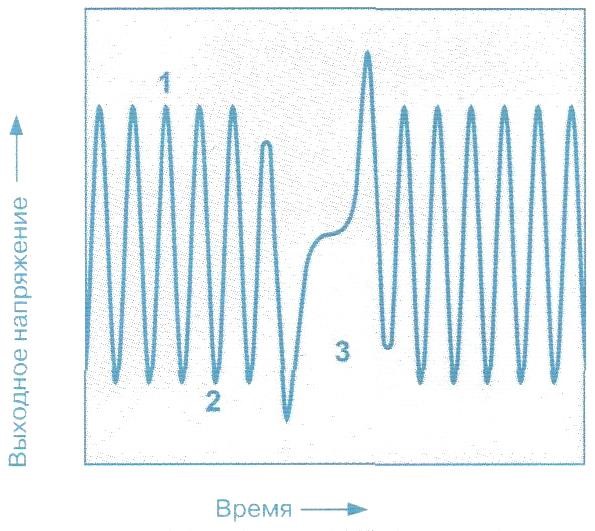
1 – зуб; 2 – паз (отверстие) между зубьями; 3 – опорная метка
ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ КОЛЕНЧАТОГО ВАЛА
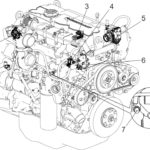
Датчик частоты вращения коленчатого вала, рисунок 8, также называемый датчиком скорости двигателя или датчиком синхронизации, установлен в верхней части картера маховика с правой стороны, если смотреть со стороны маховика, рисунок 4.
С помощью датчика частоты вращения коленчатого вала определяется частота вращения и угловое положение коленчатого вала (положение поршня) относительно верхней мёртвой точки (ВМТ) в цилиндрах двигателя. Используя информацию с датчика, ЭБУ двигателя рассчитывает начало подачи и количество топлива для каждого отдельного цилиндра.
Частота вращения рассчитывается по времени периода импульсов датчика.
Сигнал датчика частоты вращения – одна из самых важных величин для системы электронного управления двигателем.
Датчик частоты вращения коленчатого вала DG6.

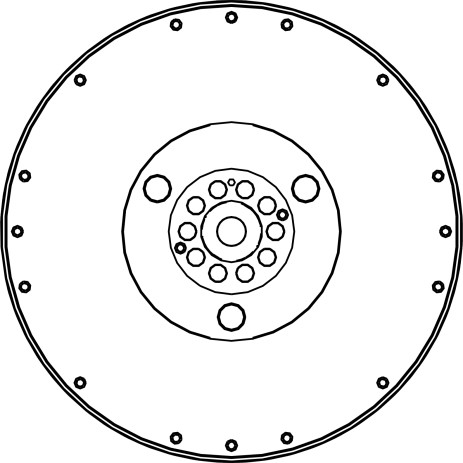
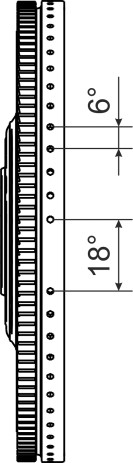
Импульсное колесо датчика одновременно является маховиком, на наружном диаметре которого имеются 58 (60 минус 2) радиальных отверстий, расположенных через 6°. Пробел в 18° (два отсутствующих отверстия) является базовой меткой и служит для определения углового положения коленчатого вала двигателя в пределах 720° и увязан с определенным положением коленчатого вала по отношению к ВМТ первого цилиндра. Маховик ориентирован с помощью штифта и закреплен на коленчатом валу.
Маховик.
ХАРАКТЕРИСТИКА ДАТЧИКА
Сопротивление катушки при 20°С: Rw = 860 Ом ±10%;
Индуктивность на частоте 1 кГц (последовательное подключение): 370 ± 60 мГн (без намагничивающихся деталей крепежа); Воздушный зазор (расстояние между датчиком и импульсным колесом): 0,3…1,8 мм.
КОНФИГУРАЦИЯ РАЗЪЁМА
Конфигурация разъёма датчика частоты вращения коленчатого вала приведена на рисунке.

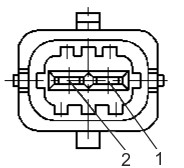
Вывод 1 (провод 036) – ЭБУ вывод Р1-36 выходной сигнал;
Вывод 2 (провод 037) – ЭБУ вывод Р1-37 масса датчика
ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ РАСПРЕДЕЛИТЕЛЬНОГО ВАЛА
Датчик частоты вращения распределительного вала, также называемый датчиком фазы, аналогичен датчику частоты вращения коленчатого вала и установлен на картер маховика с левой стороны, если смотреть со стороны маховика, рисунок 5. Частота вращения распределительного вала в два раза меньше частоты вращения коленчатого вала. ЭБУ, получая сигналы от датчика распределительного вала, определяет положение поршня первого цилиндра в ВМТ на такте сжатия и обеспечивает последовательную подачу топлива в соответствии с порядком работы цилиндров двигателя.
Импульсное колесо датчика одновременно является шестерней распределительного вала и называется фазовой шестерней.
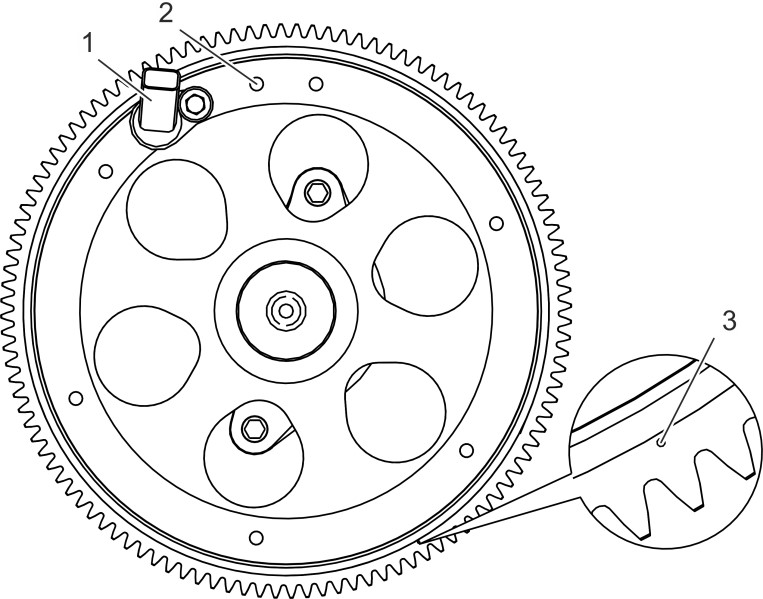
1 – датчик частоты вращения распределительного вала DG6; 2 – синхронная метка; 3 – установочная метка положения распределительного вала
На торце шестерни выполнены, в виде аксиальных отверстий, фазовые метки на каждый цилиндр. Количество отверстий составляет Z+1, где Z – число цилиндров, а 1 – дополнительное отверстие, используемое для синхронизации (например, для шестицилиндровых двигателей количество отверстий равно 6+1). Дополнительное отверстие или синхронная метка 2, рисунок 11, имеет определенный угловой интервал по отношению к фазовой метке цилиндра и расположена сразу за одной из них. Метка служит для определения углового положения распределительного вала двигателя в пределах 720° поворота коленчатого вала.
Фазовые метки через равномерные промежутки распределены по шестерне, тем самым, вместе с датчиком коленчатого вала, ЭБУ определяет момент воспламенения топлива в ВМТ 1-го цилиндра.
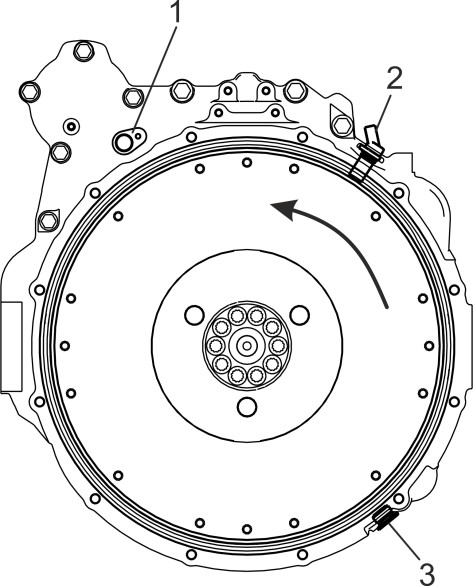
1 – датчик частоты вращения распределительного вала; 2– датчик частоты вращения коленчатого вала; 3 – пробка смотрового отверстия для определения ВМТ 1-го цилиндра
КОНФИГУРАЦИЯ РАЗЪЁМА
Конфигурация разъёма датчика частоты вращения распределительного вала приведена на рисунке
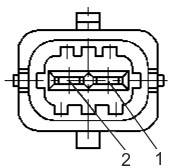
Вывод 1 (провод 034) – ЭБУ вывод Р1-34 выходной сигнал;
Вывод 2 (провод 035) – ЭБУ вывод Р1-35 масса датчика
ОТКАЗ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ ДИАГНОСТИКА НЕИСПРАВНОСТИ ДАТЧИКА
Диагностика исправности датчика DG6 осуществляется путем измерения сопротивления между контактами разъёма. Сопротивление катушки составляет приблизительно 860 Ом 10%. Этот метод, однако, не дает достоверной информации об исправности, потому что есть вероятность того, что обрыв провода в катушке не определился.
Поделиться ссылкой:
Похожие статьи
 Места установки датчиков на двигателях семейства ЯМЗ-530 CNG.
Места установки датчиков на двигателях семейства ЯМЗ-530 CNG. Датчик детонации ЯМЗ-53404, ЯМЗ-53604.
Датчик детонации ЯМЗ-53404, ЯМЗ-53604. Дроссельная заслонка с датчиком положения ЯМЗ-53404, ЯМЗ-53604.
Дроссельная заслонка с датчиком положения ЯМЗ-53404, ЯМЗ-53604. Диагностика СУДД М230.Е3.
Диагностика СУДД М230.Е3. Эксплуатационные материалы. Двигатели ЯМЗ-650, ЯМЗ-6501, ЯМЗ-6502 – руководство по эксплуатации.
Эксплуатационные материалы. Двигатели ЯМЗ-650, ЯМЗ-6501, ЯМЗ-6502 – руководство по эксплуатации. Клапан перепуска воздуха на компрессоре ТКР ЯМЗ-53404, ЯМЗ-53604.
Клапан перепуска воздуха на компрессоре ТКР ЯМЗ-53404, ЯМЗ-53604. Технические характеристики. Двигатель ЯМЗ-651 – руководство по ремонту.
Технические характеристики. Двигатель ЯМЗ-651 – руководство по ремонту. Датчик давления и температуры масла ЯМЗ-53404, ЯМЗ-53604.
Датчик давления и температуры масла ЯМЗ-53404, ЯМЗ-53604.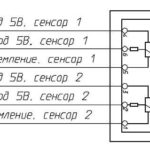 Датчик положения акселератора (электронная педаль) ЯМЗ-53404, ЯМЗ-53604.
Датчик положения акселератора (электронная педаль) ЯМЗ-53404, ЯМЗ-53604.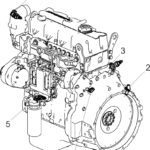 Система бортовой диагностики (БД) двигателей ЯМЗ-5340, ЯМЗ-536.
Система бортовой диагностики (БД) двигателей ЯМЗ-5340, ЯМЗ-536. Форсунка CNG с электромагнитным клапаном ЯМЗ-53404, ЯМЗ-53604.
Форсунка CNG с электромагнитным клапаном ЯМЗ-53404, ЯМЗ-53604. Датчик расхода газов системы EGR (датчик дифференциального давления отработавших газов системы рециркуляции отработавших газов) ЯМЗ-53404, ЯМЗ-53604.
Датчик расхода газов системы EGR (датчик дифференциального давления отработавших газов системы рециркуляции отработавших газов) ЯМЗ-53404, ЯМЗ-53604. Датчик температуры отработавших газов ЯМЗ-53404, ЯМЗ-53604.
Датчик температуры отработавших газов ЯМЗ-53404, ЯМЗ-53604. Датчик температуры воздуха ЯМЗ-53404, ЯМЗ-53604.
Датчик температуры воздуха ЯМЗ-53404, ЯМЗ-53604. Датчик положения заслонки системы рециркуляции отработавших газов ЯМЗ-53404, ЯМЗ-53604.
Датчик положения заслонки системы рециркуляции отработавших газов ЯМЗ-53404, ЯМЗ-53604.